Linear Actuators > Motorized Motorized Linear Slides
Linear Actuators - Electric Linear Slides
αSTEP EZS Closed Loop AZ Series Absolute Encoder Electric Linear Slides / Linear Actuators

Compact, high-rigidity electric linear slides featuring αSTEP AZ Series with absolute encoder stepper motor and driver combined with a simple, dust-resistant structure providing the high response, low vibration and hunting-free operation of a stepper motor in an electric linear slide. A wide variety of options to suit the equipment space and environment, including straight type and reversed motor type. Being compact and rigid, this series is effective in supporting large transportable mass.
- Equipped with battery-free absolute encoder
- Positioning information can be known without a sensor
- High reliability using closed loop control
- Reduced motor heat and reduced energy consumption through high efficiency design
- Requires AZ Series Driver (sold separately)
Linear Actuator / Linear Slide Comparison
Product Series |
EZS Closed Loop AZ Series Absolute Encoder Electric Linear Slides |
|
|
|
|
Features |
Closed Loop, Absolute Mechanical Encoder High Rigidity Dust Resistant |
Closed Loop High-Efficiency |
Stroke Lengths |
50 ~ 850 mm |
50 ~ 500 mm |
Driver Required |
AZ Series |
AR Series |
Driver Input Power |
AC or DC Input |
AC or DC Input |
Available Options |
Reversed Motor Type Electromagnetic Brake |
Reversed Motor Type X- or Y-Axis Table Electromagnetic Brake |
Max. Speed |
400 or 800 mm/s (AC Input) 300 or 600 mm/s (DC Input) |
400 or 800 mm/s (AC Input) 300 or 600 mm/s (DC Input) |
Max. Horizontal Transportable Mass |
~30 or ~60 kg |
~30 or ~60 kg |
Max. Vertical Transportable Mass* |
~15 or ~30 kg |
~15 or ~30 kg |
Learn More |
EZS Closed Loop AZ Series Absolute Encoder Electric Linear Slides |

*Electromagentic Brake required for Vertical Operation
αSTEP Hybrid Control System
αSTEP products are stepper motor based hybrid motors with a unique hybrid control system combining the benefits of "open loop control" and "closed loop control".
The position of the motor is always monitored, and then the driver automatically switches between 2 types of control depending on the situation.
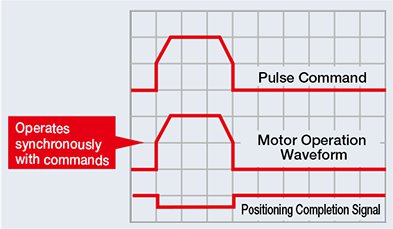
Normally Operates in Open Loop Control for the Same Ease of Use as a Stepper Motor

High Response
By utilizing the high responsiveness of the stepper motor, moving a short distance for a short time is possible. The motors can execute commands without lag.
Holding the Stop Position without Hunting
During positioning, the motor stops with its own holding force without hunting. Because of this, it is ideal for applications where the low rigidity of the mechanism requires absence of vibration upon stopping.
Tuning-Free
Because it is normally operated with open loop control, positioning is still possible without gain adjustment even when the load fluctuates due to the use of a belt mechanism, cam or chain drive, etc.
Switches to Closed Loop Control during Overload for More Reliable Operation like a Servo Motor
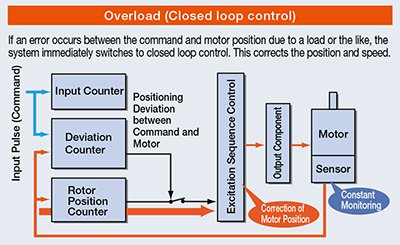
Continues Operation Even with Sudden Load Fluctuation and Sudden Acceleration
It operates synchronously with commands using open loop control during normal conditions. In an overload condition, it switches immediately to closed loop control to correct the position.

Alarm Signal Output in Case of Abnormality
If an overload is applied continuously, an alarm signal is output. When the positioning is complete, and END signal is output. This ensures the same level of reliability as a servo motor.
αSTEP AZ Series Product Family

Linear Actuator Videos


Linear Actuator Technical Articles